HOME > AGV無線統合制御システム(遠隔操作)

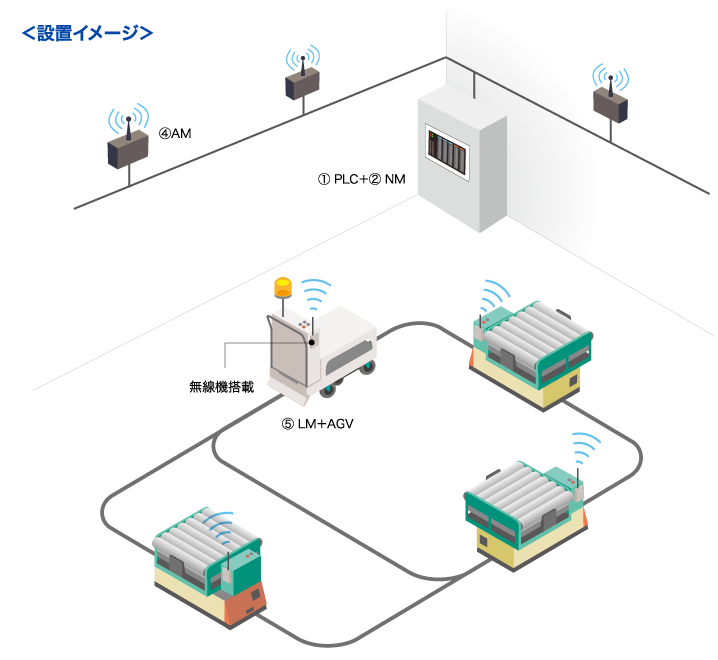
統合制御システムは、無線を使ってAGVの運行管理、監視を地上側のモニタ盤で制御する仕組みです。

運行管理
- 1.行先指示(走行ルート指示)
- 2.交差点、合流制御
- 3.停止ステーションへの進入制御
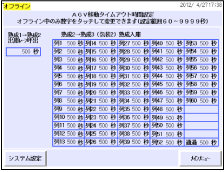
- 4.運用タクトの変更
- 5.条件付発進(台車位置情報により発進等)
- 6.要求ルートへの進入(台車位置情報によりルート指示)
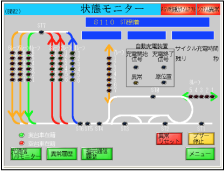
監視
- 1.AGVの現在位置把握(タッチパネルにマップ表示)
- 2.AGVの状態把握(走行中、障害物停止、作業中等)

- ①AGV統合制御システム用PLC:AGVを統括制御するPLCです。
- ②NM(ネットワークマスター):PLCとAGV間で送受信するデータをPLCのデータレジスタに読書きします。
- ③HUB
- ④AM(エリアマスター):無線中継機。LMと無線通信を行います。
- ⑤LM(ローカルマスター):無線子機。AGV各1台搭載しています。

-
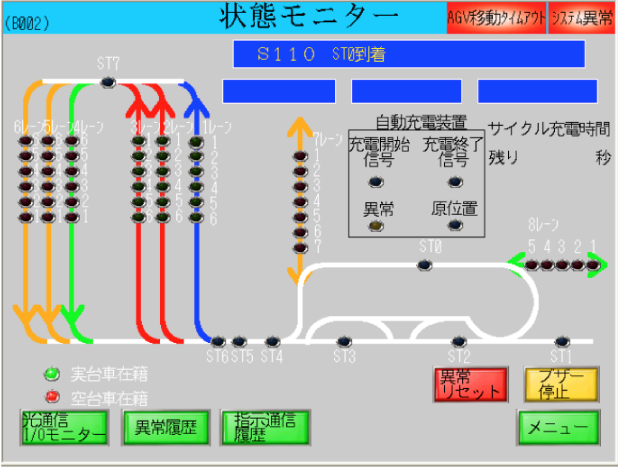
搬送台車及びAGVの在籍
-
通信ポイントの状態表示
-
異常履歴
-
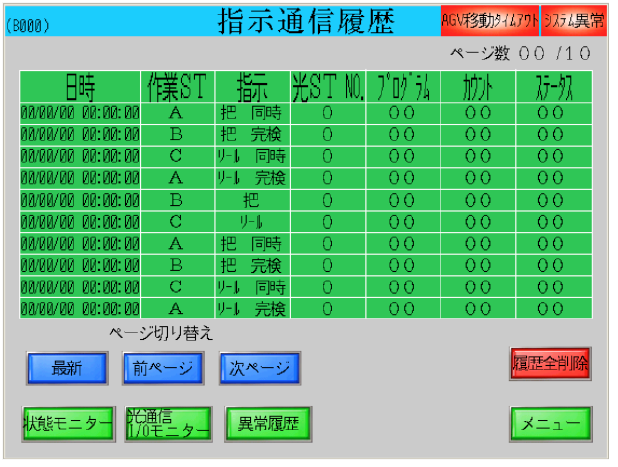
通信指示履歴
-
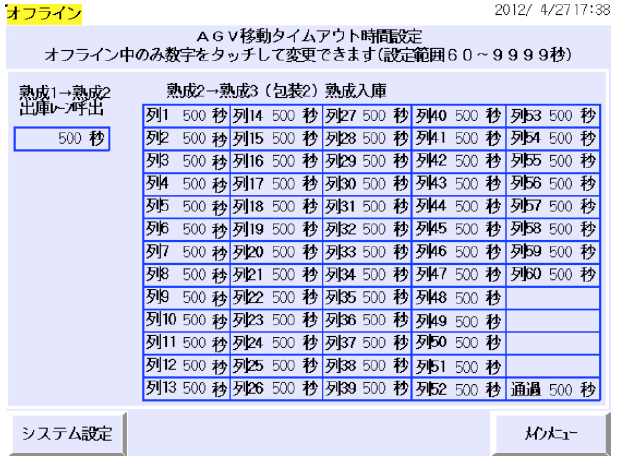
AGV区間タイムアウト時間設定

運行管理
- (1)起動、停止
- (2)リセット、運転準備ON/OFF
- (3)前後進切り替え
- (4)ピンフック上昇、下降
- (5)車速指示
- (6)プログラムデータ
- (7)右・左分岐
- (8)障害物センサー検知エリア指示
- (9)モード停止(ブレーキ停止、充電停止)
監視
- (1)プログラム情報
- (2)ステップ情報
- (3)異常コード(コード番号 ~128)
- (4)AGVの動作状況
- (5)AGV作業情報
CarryBee(キャリビー)は、工程間の搬送、生産ラインヘの部品供給、セル生産ライン〈AGV上で組立て〉などで合理化を図れる無人搬送システムです。

愛知機械テクノシステム株式会社 〒456-0055 愛知県名古屋市熱田区南一番町1番10号 TEL: 052-661-1011 FAX: 052-661-1012